SiamMask
概述
- 兼顾视频对象分割与目标追踪。
- 由于是通过分割再根据掩码划出边缘框,拥有相当高的精度,但是也导致网络无法应对被遮挡的情况。
- 分为两个部分,其中第二个部分有两种结构:
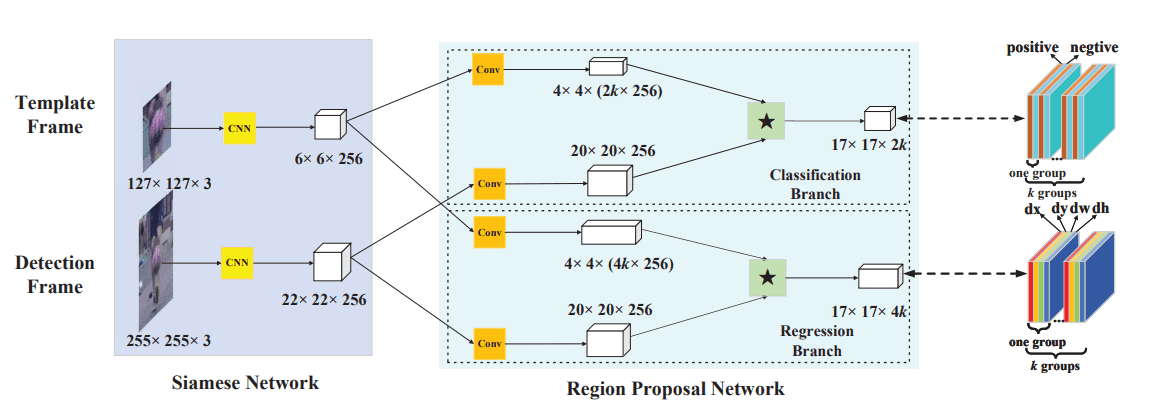
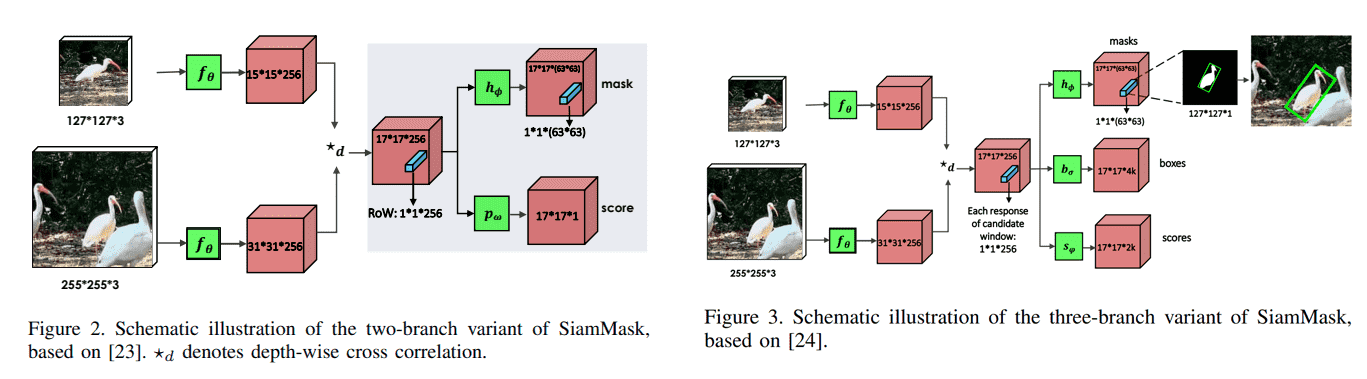
- Siamese网络:分别提取template与search输入图像的特征,进行通道互相关。
- 第二部分:
- 二分支结构:
- Score 分支:目标是区分每个 row 是目标对象or背景。
- Mask 分支:为每个 row 输出一个分割掩码。
- 三分支结构:
- Mask 分支:为每个 row 输出一个分割掩码。
- Box 分支 & Score 分支:与 SiamRPN 中的一样,生成k个锚框,预测每个位置上的对象概率与回归个锚框的x,y,h,w。
- 二分支结构:
方法
Siamese 网络
与SiamFC不同的是,为了让每个 Row 编码更丰富的信息,将原始的简单互相关操作 替换为深度互相关 即每个 channel 单独计算互相关,最后拼接在一起,得到一个与template特征和search特征相同深度的响应图。
第二部分
由于三分支结构中的MaskBranch与二分支的一样、Box 分支与 Score 分支与 SiamRPN 一样,所以只将二分支结构。
Socre Branch
通过卷积层将相应图映射到单通道。
MaskBranch
利用一个vector来编码一个RoW的mask,导致特征图的通道数非常多, MaskBranch 使用 卷积来升维。此时的Mask精度不够,需要更精细的分割需要通过Refine Module来提升精度,但是对于生成边界框已经足够了。
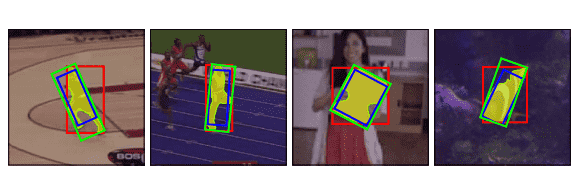
三种生成边界框的方式:
- 包含对象的最小外接矩形(绿色)
- 包含对象的最小轴对齐矩形(红色)
- 通过优化策略获得的矩形(蓝色)
Mask损失:
其中 表示第 个 row 是前景()还是背景(),当为背景时公式中的 即不计入损失,当为前景时,计算所有点上的二分类损失的平均值 , 表示点 上是()否()遮罩, 是label, 越小时 越大, 也越大。
总体来说即为,Mask损失为所有前景的row的mask的所有点的二分类损失的平均值的和。
Refine Module
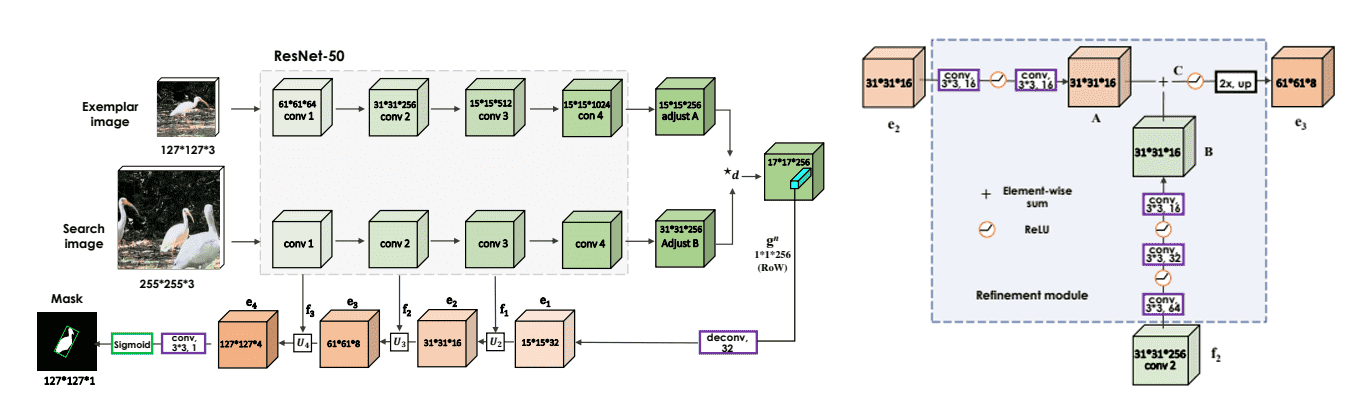
如果是进行分割,则不再使用MaskBranch,而是将Score分数最高的Row,进行上采样,生成高精度Mask。
将分数最高的 的Row,进行反卷积得到 的特征图,并与 Siamese 网络中保存的特征图进行卷积变换到通道数相同后逐元素相加,不断提高分辨率到 经过一层卷积与Sigmoid得到最终的 的Mask。
ArxivAll articles in this blog are licensed under CC BY-NC-SA 4.0 unless stating additionally.